ATMega328 (Arduino uno) TimerCounter et PWM à 62,5kHz
30 Apr 2012Timer/Counter et PWM pour des fréquences élevées.
Cet article traite de l’utilisation de certaines fonctionnalités de l’ATMega328P qui peuvent s’avérer utiles pour le traitement des signaux audio (par exemple, réaliser une pédale d’effet), jouer des samples de musique (échantillonnés à 44100Hz ou moins), ou encore réaliser de la synthèse sonore.
Il est question d’aborder ici le strict minimum pour utiliser le PWM (Pulse Width Modulation) à une fréquence suffisamment élevée afin de pouvoir générer un signal analogique et de contrôler son amplitude. En bonus, nous pourrons exécuter une interruption toutes les 16uS.
Je recommande fortement aux gens ayant un peu d’expérience de lire directement la documentation relative aux Timers/Counters, PWM, et aux registres DDRx/PORTx.
Timer et PWM
L’ATMega328P comprend 3 Timers, c’est-à-dire trois compteurs qui sont incrémentés par le microcontrôleur tous les N ticks d’horloge (K peut valoir 1, 8, 32, 64, 256, 1024 selon vos envies). Ces timers se nomment “Timer0”, “Timer1” et “Timer2”. Le Timer0 est utilisé par la bibliothèque arduino pour évaluer l’écoulement du temps (delay, microsecond) et pour les sorties PWM associées à ce timer. Le Timer1 dispose d’un compteur 16bits, c’est-à-dire de 0 à 0xFFFF, alors que les timers 2 et 1 sont en 8bits (de 0 à 0xFF). L’idée est que nous voulons compter vite, très vite, donc nous avons intérêt à utiliser un compteur 8bits. Notre choix se porte donc tout naturellement sur le timer2.
Le PWM correspond à la mise sous tension d’une patte de l’ATMega durant un certain laps de temps, puis de sa mise à 0 durant un autre instant, et le tout répété très rapidement. Cela permet de simuler un signal analogique de tension comprise entre 5v et 0v (Moins si vous n’utilisez pas l’alimentation 5V). Le principe est très bien décrit par le schéma suivant provenant du site d’arduino(http://arduino.cc/en/Tutorial/PWM) :
Il faut savoir que chaque Timer contrôle deux sorties PWM. Les pattes correspondant à ces sorties sont indiquées sur la page 2 de la documentation atmel (OCnA et OCnB, où n est le numéro du timer). Dans notre cas nous utiliserons la sortie OC2A, qui correspond au pin 11 d’une carte arduino.
Le fonctionnement du PWM est extrêmement simple ; Vous réglez le PWM avec une valeur comprise entre 0 et 255, disons C. Alors, tant que le compteur est plus petit que C, il y aura une tension de 5V sur la sortie OC2A. Quand le compteur dépasse C, la tension passe à 0V. Pour accélérer une sortie PWM, il faut donc accélérer le timer qui est associé.
Le mode FastPWM (ATMega328P datasheet p152-153)
Il existe plusieurs configurations possibles pour la sortie PWM, la fréquence des timers, etc. Je vous conseille très fortement de lire la documentation atmel à ce sujet. Dans notre cas, nous cherchons la plus rapide, et il y en a une qui correspond tout à fait à nos besoins ; La configuration Fast PWM.
Le compteur que nous avons évoqué, associé au Timer2, se nomme “TCNT2”(Timer Counter 2), et peut être lu et écrit à tout moment. La valeur à partir de laquelle le signal bascule de 5V à 0V est stockée dans OCR2A(Output Compare Register 2 A). Un second registre de comparaison est disponible, OCR2B, et correspond au pin OC2B.
Dans ce mode, le compteur TCNT2 part de 0, puis atteint progressivement OCR2A. Alors, la tension de sortie de OC2A s’inverse. À cet instant, une interruption peut être déclenchée. C’est-à-dire, si vous n’êtes pas familier avec ce mécanisme, qu’une fonction que vous aurez préalablement écrite, compilée, et associée à ce mécanisme, sera exécutée. De même pour OCR2B/OC2B.
Le compteur continue sa montée, et atteint alors 0xFF. Il y a alors overflow : le compteur repasse à 0x00 à la prochaine incrémentation, et enclenche l’interruption TIMER2_OVF (Timer 2 Overflow), si elle est activée.
Sachez enfin que vous pouvez configurer si la tension de sortie avant que le compteur atteigne OCR2A doit être haute ou basse. Nous choisirons qu’elle est haute, puis basse. De cette façon, si OCR2A = 0, la tension sera 0 sur une période (16us, pour mémoire), et si OCR2A = 0xFF, elle sera de 5V (toujours sur une période).
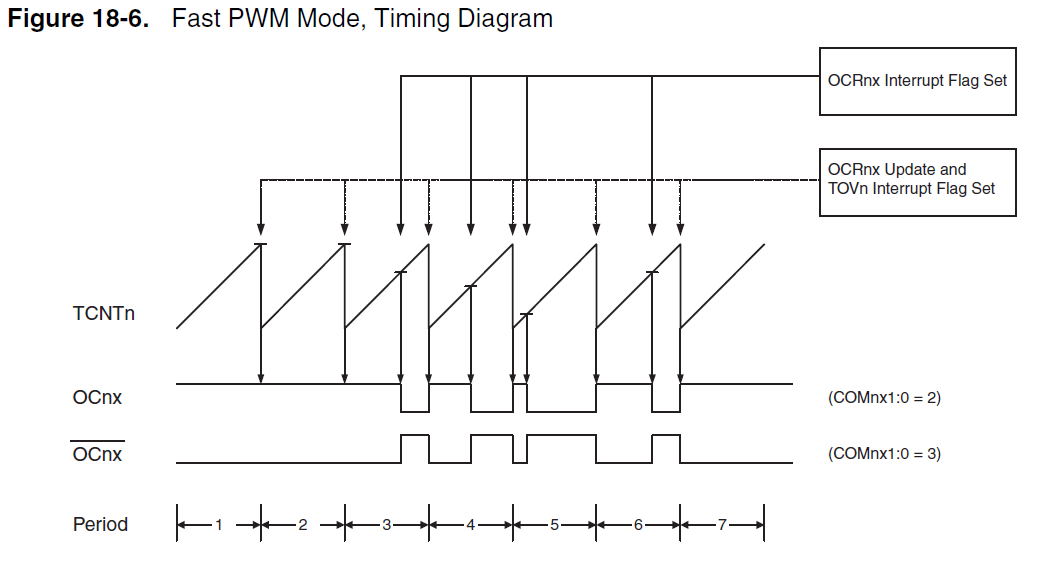
Le schéma suivant, issu de la documentation, décrit une succession d’interventions sur le registre OCR2A, l’évolution du compteur, le déclenchement des interruptions, et les tensions de sorties (haut pour 5V et bas pour 0V) selon la configuration des deux bits COM2A1 et COM2A0 (Pour les valeurs 2( = 1 0 en binaire) et 3 = (1 1 en binaire))
La fréquence à laquelle l’interruption TOV2(TIMER2OVF) est appelée se calcule aisément à partir de celle de l’horloge de l’ATMega. Si vous utilisez un quartz externe à 16MHz (c’est le cas des cartes arduino) la fréquence est alors $\frac{f{clock}}{N . 256}$ où $N$ est le facteur d’échelle (prescale factor), dont nous parlerons un peu plus loin.
L’activation du mode FastPWM (p160 de la documentation) se fait en fixant les bits du “Timer Counter Control Register” A et B (TCCR2A et TCCR2B).
Le premier contient le type de sortie COM2A1:0 et COM2B1:0, ainsi que les bits WGM21 WMGM20 contrôlant le mode de l’horloge. Le second (p163) contient le dernier bit de configuration du mode, WGM22 et les trois bits permettant de sélectionner le facteur d’échelle (dans notre cas, nous choisirons 1, pour que la fréquence soit la plus élevée) ; CS22, CS21, CS20.
Ainsi, nous pouvons déjà configurer le mode Fast PWM :
TTCCR2A = 1 << COM2A1 | 1 << WGM01 | 1 << WGM00;
TTCCR2B = 0 << WGM02 | 0 << CS22 | 0 << CS21 | 1 << CS20;
Nb : Sachez que pour chacun des modes, vous trouverez un tel schéma dans la documentation :)
Facteur d’échelle
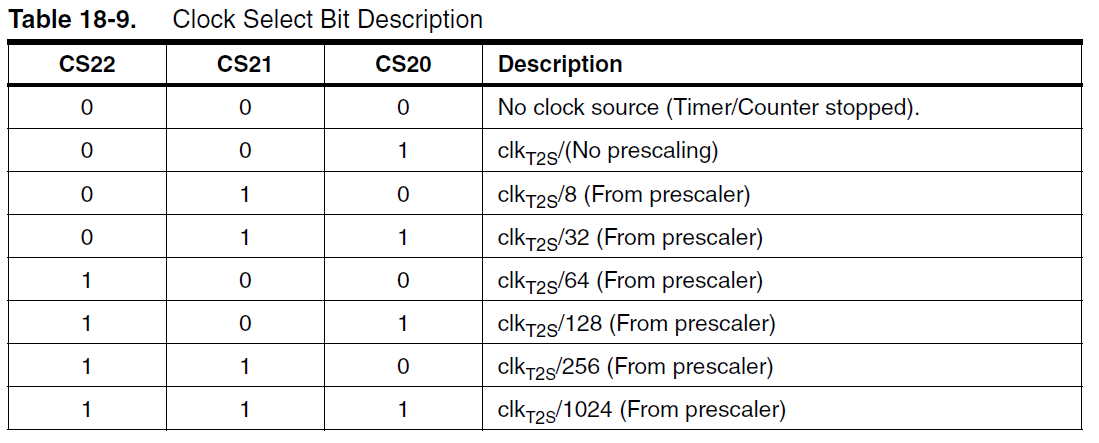
Les bits CS22, CS21 et CS20 permettent de configurer le facteur d’échelle. Le concept est simple (p155 et p156 de la documentation pour des schémas extrêmement clairs) ; le compteur TCNT2 sera incrémenté de 1 tous les N ticks d’horloge, où la valeur de N dépend du facteur d’échelle choisi, d’après le tableau suivant (p164 de la documentation) :
Activer la sortie PWM
Nous avons donc configuré le compteur, et la sortie PWM peut maintenant être utilisée. Mais encore faut-il l’activer. Pour cela, il faut sélectionner la “direction” du pin associé au comparateur A (OC2A) comme “OUTPUT”. Cela se fait via le Data Direction Register B (car la sortie OC2A est la troisième patte du port B, c’est-à-dire la sortie 11 de la carte arduino).
DDRB |= 1 << DDB3;
Pour désactiver la sortie PWM lorsque le pin est toujours en mode output, il suffit de modifier la valeur de COM2A.
Utiliser les interruptions
Le dernier outil, pour pouvoir par exemple effectuer une acquisition audio à $31,25kHz$, est interruption OVF, déclenchée dès que le compteur passe de 0xFF à 0x00. Pour ce faire, il faut informer le compilateur que votre fonction doit être associée à une interruption, et activer l’interruption grâce au masque d’interruption TIMSK2.
// Configuration
TIMSK2 = 1 << TOIE2;
// ...
ISR(TIMER2_OVF_vect)
{
// Code de l'interruption
}
La bibliothèque C AVR
Si nous pouvons utiliser toutes ces macros, c’est bien qu’elles sont définies quelque part. Il s’agit d’une bibliothèque C permettant de développer sur les microcontrôleurs Atmel en C. Cette bibliothèque contient une documentation dont je recommande chaudement la lecture, notamment pour ceux qui souhaiteraient diminuer le temps perdu en entête C dans l’interruption OVF (environ 20 à 30 ticks d’horloge à 16MHz, ce qui représente tout de même 20 à 30 256ièmes du temps d’exécution de votre microcontrôleur !)
Sachez aussi qu’une façon plus agréable d’écrire (1 « ABCD) est _BV(ABCD).
Références:
- La bibliothèque C AVR (Interruptions) : http://www.nongnu.org/avr-libc/user-manual/group__avr__interrupts.html
- Atmel ATMega328 Datasheet : http://www.atmel.com/images/atmel-8271-8-bit-avr-microcontroller-atmega48a-48pa-88a-88pa-168a-168pa-328-328p_datasheet_summary.pdf
- Realtime Audio Processing de Martin Nawrath : http://interface.khm.de/wp-content/uploads/2008/10/arduino_realtime_audio_eng.pdf
- PWM : http://arduino.cc/en/Tutorial/PWM